


 Das ist die deutschsprachige Version.
Das ist die deutschsprachige Version.  English versions are available on en.yukterez.net and yukipedia.
English versions are available on en.yukterez.net and yukipedia.Verwandte Beiträge: Kerr Newman || Kerr || De Sitter || Geodäten || Gravitationslinsen || Raytracing || Flamms Paraboloid

Freier Fall in ein schwarzes Loch mit v=-c√(rₛ/r) aus der Perspektive der Freifallers. Winkeldurchmesser des Schattens: klick, Diskussion: 1 und 2

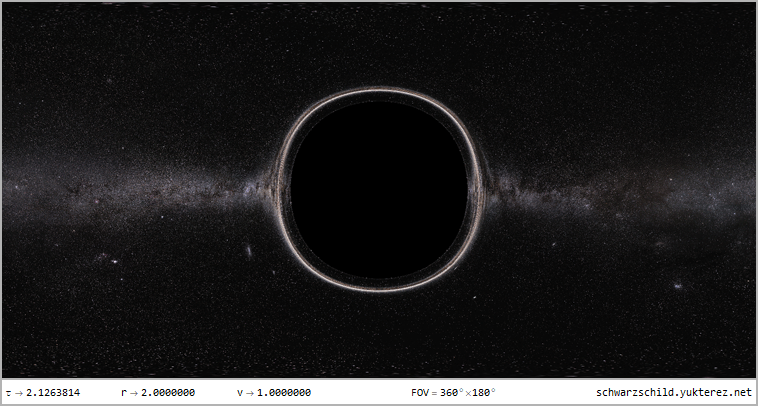
Vollpanorama des mit v=-c√(rₛ/r) hineinfallenden Beobachters im Moment in dem der Horizont überschritten wird
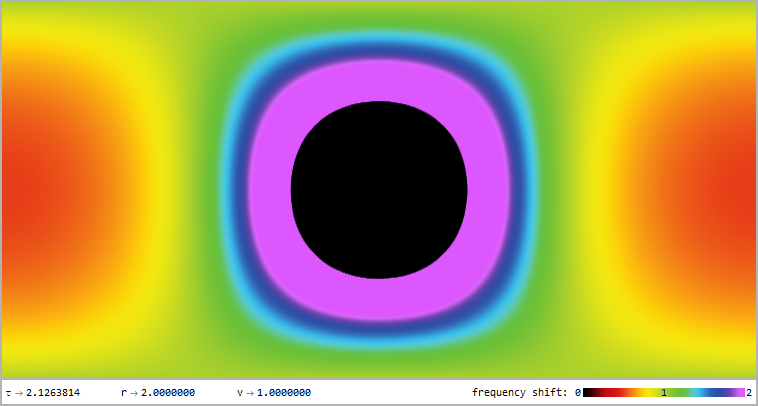
Rot/Blauverschiebungsprofil für den mit der negativen Fluchtgeschwindigkeit fallenden Beobachter im oberen Bild

Aberration in den Augen von drei Beobachtern auf der selben Position r=6GM/c² mit verschiedenen Geschwindigkeitsvektoren
Optische Verzerrung einer Erdkugel mit r=1.0001rₛ, Beobachter auf R=17.5rₛ: durch den Gravitationslinseneffekt ist auch die Rückseite sichtbar
links: Strahlenbündel im flachen Minkowskiraum, rechts: Schwarzschild. Entfernung der Lichtquelle von schwarzen Loch: 20GM/c²
Strahlenbündel mit Stoßparameter b=√27≈5.2GM/c² (der scheinbare Radius des schwarzen Lochs im System eines Beobachters at infinity)
Orbit mit Periheldrehung; Startbedingungen: r₀=5, θ0=π/2, v₀=vz₀=vθ₀=51/50·√((1/5)/(1-2/5)).
Freier Fall in ein schwarzes Loch mit v=-c√(rₛ/r) aus der Perspektive der Freifallers. Winkeldurchmesser des Schattens: klick, Diskussion: 1 und 2
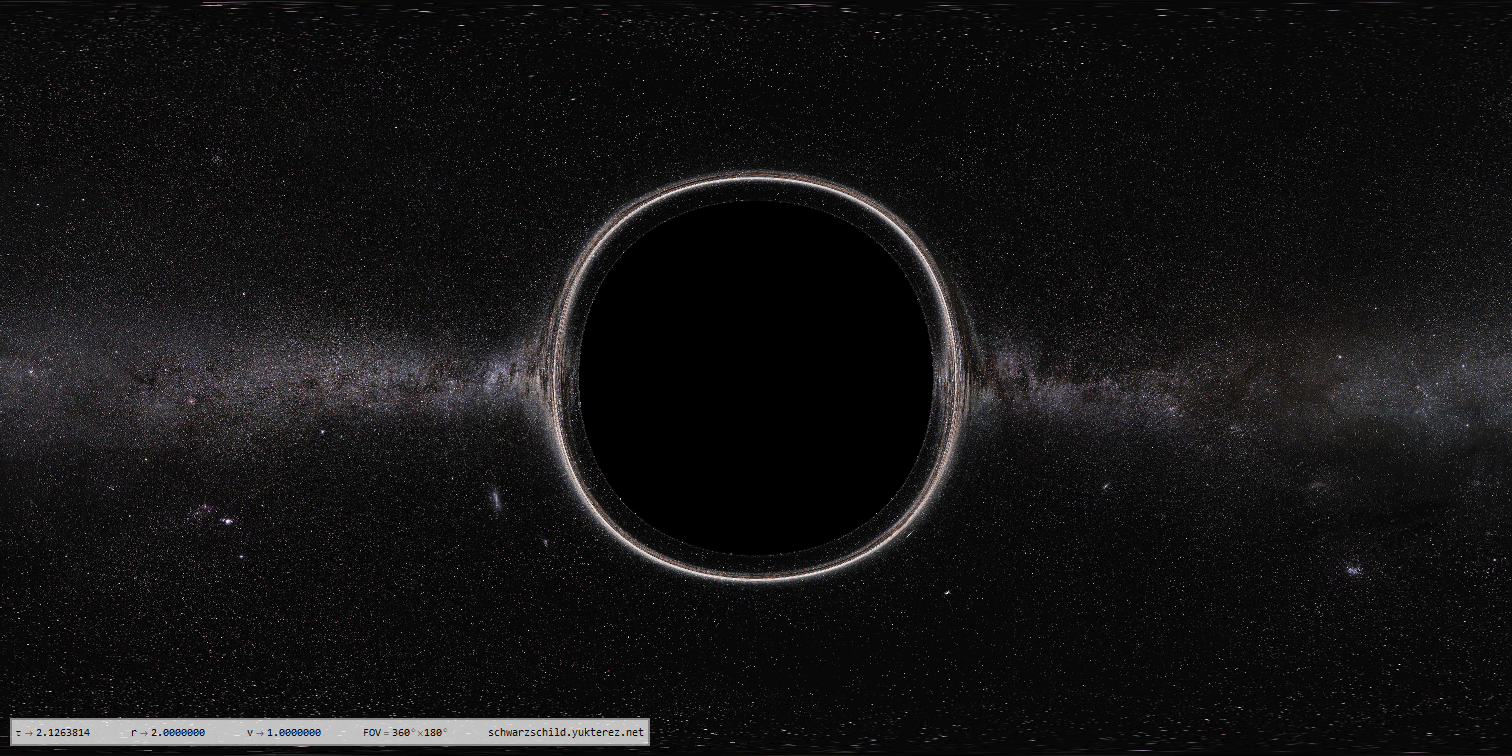
Vollpanorama des mit v=-c√(rₛ/r) hineinfallenden Beobachters im Moment in dem der Horizont überschritten wird
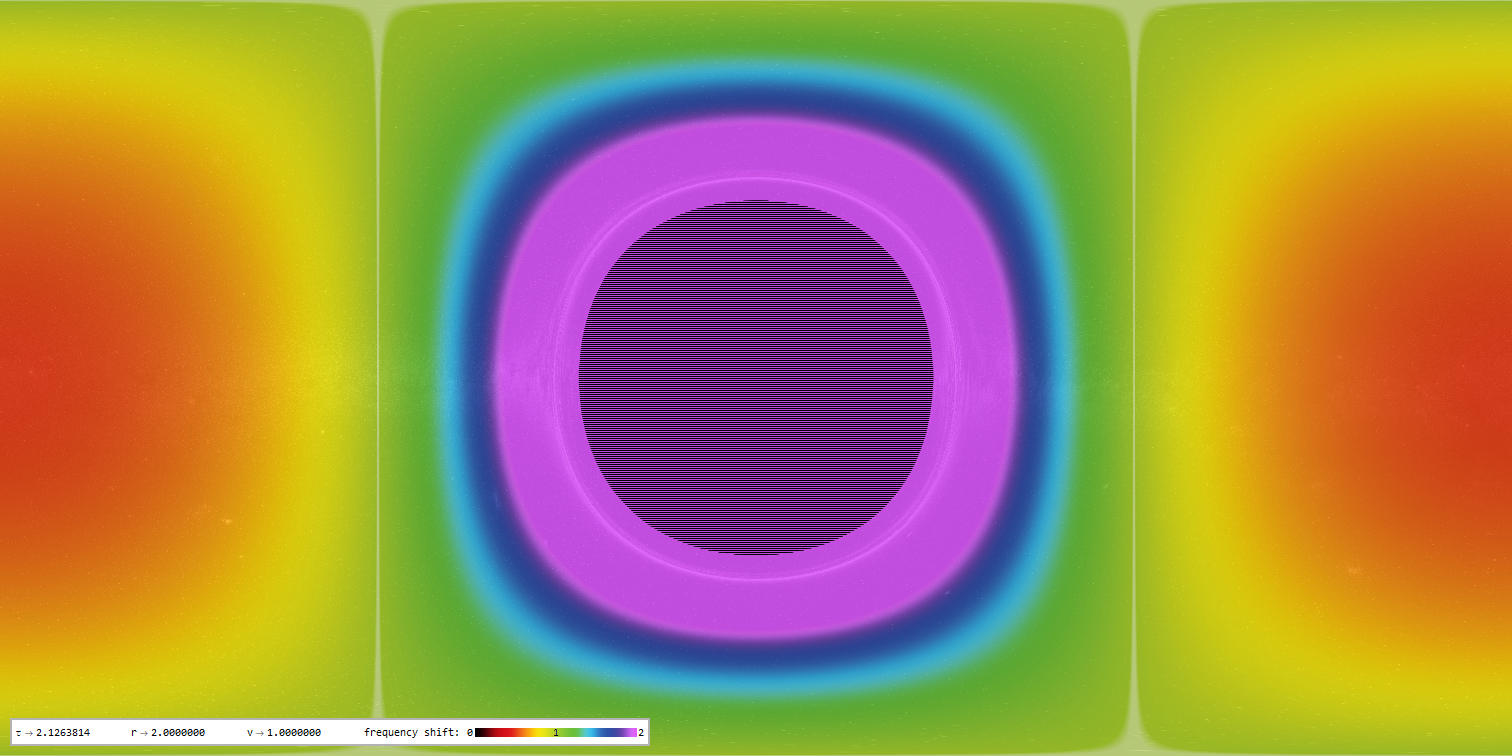
Rot/Blauverschiebungsprofil für den mit der negativen Fluchtgeschwindigkeit fallenden Beobachter im oberen Bild
Aberration in den Augen von drei Beobachtern auf der selben Position r=6GM/c² mit verschiedenen Geschwindigkeitsvektoren

Optische Verzerrung einer Erdkugel mit r=1.0001rₛ, Beobachter auf R=17.5rₛ: durch den Gravitationslinseneffekt ist auch die Rückseite sichtbar
links: Strahlenbündel im flachen Minkowskiraum, rechts: Schwarzschild. Entfernung der Lichtquelle von schwarzen Loch: 20GM/c²
Strahlenbündel mit Stoßparameter b=√27≈5.2GM/c² (der scheinbare Radius des schwarzen Lochs im System eines Beobachters at infinity)
Orbit mit Periheldrehung; Startbedingungen: r₀=5, θ0=π/2, v₀=vz₀=vθ₀=51/50·√((1/5)/(1-2/5)).
▥ Metrischer Tensor in Droste Koordinaten {t,r,θ,Ф}:


▦ Eingehende Finkelstein Koordinaten mit ť wobei dt→dť+dr(rs/r)/(1-rs/r)/c:


▧ Gullstrand-Painlevé Raindrop Koordinaten, Koordinatenzeit defininert durch die Eigenzeit von Freifallern, dt→dτ+dr√(rs/r)/(1-rs/r)/c:


Bewegungsgleichung in Schwarzschildkoordinaten (für Photonen wird der Gammafaktor auf 1, μ=0 und m=hf/c²=konstant gesetzt, wobei f die Frequenz mit der es im Unendlichen ankommt ist):



mit Overdot für das Differential nach der Eigenzeit τ und gestrichelt nach der Koordinatenzeit t:

mit v⊥=v cos ζ als die transversale, und v∥=v sin ζ als die radiale lokale Dreiergeschwindigkeit mit dem lokalen Abschusswinkel ζ (von außen erscheint dieser aufgrund der radialen Tiefenexpansion dR>dr flacher). Bei rein radialer Bewegung vereinfacht sich die Bewegungsgleichung zu
Um die Schalenzeit eines stationären Beobachters auf r zu erhalten wird t einfach mit √(1-rs/r) multipliziert, mit dem Schwarzschildradius rs=2GM/c². Die totale Zeitdilatation ist das multiplikative Produkt aus der gravitativen und der kinematischen Zeitdilatation.
Um von der lokalen Geschwindigkeit auf die beobachtete zu transformieren gilt für die radiale und transversale Komponente:

Der Betrag der lokalen bzw. verzögerten Geschwindigkeit ist dann nach Pythagoras

Der Drehimpuls
und die Gesamtenergie at infinity (die relativistische Masse mal der gravitativen Zeitdilatation)

sind konstant. Die lokale kinetische Energie und die potentielle Energie als Differenz der lokalen Energie zu jener at infinity ist

Effektives Potential:
Die radiale Fluchtgeschwindigkeit um von r₀ nach r₁ zu gelangen ist
womit die radiale Fluchtgeschwindigkeit in die Unendlichkeit (r₁→∞)

ist. Lokale Kreisbahngeschwindigkeit, bei der Photonensphäre auf r=3rₛ/2 die Lichtgeschwindigkeit:
Eigenzeit für den freien Fall von r₀ bis r:

Koordinatenzeit für den freien Fall von r₀ bis r:

Physikalischer Abstand zwischen zwei verschiedenen r mit lokalen stationären Linealen gemessen:

Abstand vom Horizont zur Singularität im System eines mit der negativen Fluchtgeschwindigkeit einfallenden Freifallers:
In Droste Koordinaten mit grr=-1/(1-rs/r) und v=-√(rs/r) wobei γ=1/√(1-v²/c²) bzw. in Raindrop Koordinaten mit grr=-1 und v=0 wobei γ=1. Bei einem Freifall aus der Ruhelage knapp über dem Horizont ist die aufintegrierte Strecke d=πGM/c². Für die Gleichungen in anderen Koordinaten siehe hier. Simulator (mit a=℧=0 reduziert sich der Kerr Newman Simulator auf Schwarzschild): klick
▦ Eingehende Finkelstein Koordinaten mit ť wobei dt→dť+dr(rs/r)/(1-rs/r)/c:
▧ Gullstrand-Painlevé Raindrop Koordinaten, Koordinatenzeit defininert durch die Eigenzeit von Freifallern, dt→dτ+dr√(rs/r)/(1-rs/r)/c:
Bewegungsgleichung in Schwarzschildkoordinaten (für Photonen wird der Gammafaktor auf 1, μ=0 und m=hf/c²=konstant gesetzt, wobei f die Frequenz mit der es im Unendlichen ankommt ist):
mit Overdot für das Differential nach der Eigenzeit τ und gestrichelt nach der Koordinatenzeit t:
mit v⊥=v cos ζ als die transversale, und v∥=v sin ζ als die radiale lokale Dreiergeschwindigkeit mit dem lokalen Abschusswinkel ζ (von außen erscheint dieser aufgrund der radialen Tiefenexpansion dR>dr flacher). Bei rein radialer Bewegung vereinfacht sich die Bewegungsgleichung zu
Um die Schalenzeit eines stationären Beobachters auf r zu erhalten wird t einfach mit √(1-rs/r) multipliziert, mit dem Schwarzschildradius rs=2GM/c². Die totale Zeitdilatation ist das multiplikative Produkt aus der gravitativen und der kinematischen Zeitdilatation.
Um von der lokalen Geschwindigkeit auf die beobachtete zu transformieren gilt für die radiale und transversale Komponente:
Der Betrag der lokalen bzw. verzögerten Geschwindigkeit ist dann nach Pythagoras
Der Drehimpuls
und die Gesamtenergie at infinity (die relativistische Masse mal der gravitativen Zeitdilatation)
sind konstant. Die lokale kinetische Energie und die potentielle Energie als Differenz der lokalen Energie zu jener at infinity ist
Effektives Potential:
Die radiale Fluchtgeschwindigkeit um von r₀ nach r₁ zu gelangen ist
womit die radiale Fluchtgeschwindigkeit in die Unendlichkeit (r₁→∞)
ist. Lokale Kreisbahngeschwindigkeit, bei der Photonensphäre auf r=3rₛ/2 die Lichtgeschwindigkeit:
Eigenzeit für den freien Fall von r₀ bis r:
Koordinatenzeit für den freien Fall von r₀ bis r:
Physikalischer Abstand zwischen zwei verschiedenen r mit lokalen stationären Linealen gemessen:
Abstand vom Horizont zur Singularität im System eines mit der negativen Fluchtgeschwindigkeit einfallenden Freifallers:
In Droste Koordinaten mit grr=-1/(1-rs/r) und v=-√(rs/r) wobei γ=1/√(1-v²/c²) bzw. in Raindrop Koordinaten mit grr=-1 und v=0 wobei γ=1. Bei einem Freifall aus der Ruhelage knapp über dem Horizont ist die aufintegrierte Strecke d=πGM/c². Für die Gleichungen in anderen Koordinaten siehe hier. Simulator (mit a=℧=0 reduziert sich der Kerr Newman Simulator auf Schwarzschild): klick























